网站建设项目介绍百度搜图入口
Moveit与Gazebo联合仿真
上一篇博客已经将moveit!配置完毕,然而想要让moveit!控制gazebo中的机械臂,还需要进行一些接口的配置。现在我们有的功能包为sunday_description、sunday_moveit_config这两个功能包。且已经配置好xacro文件,本篇内容需要进行gazebo功能包的配置以及moveit功能包的文件修改。
sunday_gazebo
创建sunday_gazebo功能包
catkin_create_pkg sunday_gazebo roscpp rospy std_msgs
创建launch、config、world、scripts等文件夹,其列表如下所示
.
├── CMakeLists.txt
├── config
├── include
├── launch
├── package.xml
├── scripts
├── src
└── world配置关节轨迹控制器
创建sunday_gazebo/config/sunday_trajectory_control.yaml文件,用于配置关节轨迹控制器,代码如下:
sunday:arm_joint_controller:type: "position_controllers/JointTrajectoryController"joints:- joint_1- joint_2- joint_3- joint_4- joint_5- joint_6gains:joint_1: {p: 1000.0, i: 0.0, d: 0.1, i_clamp: 0.0}joint_2: {p: 1000.0, i: 0.0, d: 0.1, i_clamp: 0.0}joint_3: {p: 1000.0, i: 0.0, d: 0.1, i_clamp: 0.0}joint_4: {p: 1000.0, i: 0.0, d: 0.1, i_clamp: 0.0}joint_5: {p: 1000.0, i: 0.0, d: 0.1, i_clamp: 0.0}joint_6: {p: 1000.0, i: 0.0, d: 0.1, i_clamp: 0.0}对应创建sunday_gazebo/launch/sunday_trajectory_controller.launch文件,用于加载上述yaml文件代码如下:
<launch><rosparam file="$(find sunday_gazebo)/config/sunday_trajectory_control.yaml" command="load"/><node name="arm_controller_spawner" pkg="controller_manager" type="spawner" respawn="false"output="screen" ns="/sunday" args="arm_joint_controller"/></launch>
配置关节状态控制器
创建sunday_gazebo/config/sunday_gazebo_joint_states.yaml文件,用于配置关节状态控制器,代码如下:
sunday:# Publish all joint states -----------------------------------joint_state_controller:type: joint_state_controller/JointStateControllerpublish_rate: 50
对应创建sunday_gazebo/launch/sunday_gazebo_states.launch文件,用于加载上述yaml文件代码如下:
<launch><!-- 将关节控制器的配置参数加载到参数服务器中 --><rosparam file="$(find sunday_gazebo)/config/sunday_gazebo_joint_states.yaml" command="load"/><node name="joint_controller_spawner" pkg="controller_manager" type="spawner" respawn="false"output="screen" ns="/sunday" args="joint_state_controller" /><!-- 运行robot_state_publisher节点,发布tf --><node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher"respawn="false" output="screen"><remap from="/joint_states" to="/sunday/joint_states" /></node></launch>
配置gazebo环境
创建sunday_gazebo/launch/sunday_gazebo_world.launch文件,用于加载gazebo环境,代码如下:
<launch><!-- these are the arguments you can pass this launch file, for example paused:=true --><arg name="paused" default="false"/><arg name="use_sim_time" default="true"/><arg name="gui" default="true"/><arg name="headless" default="false"/><arg name="debug" default="false"/><!-- We resume the logic in empty_world.launch --><include file="$(find gazebo_ros)/launch/empty_world.launch"><arg name="debug" value="$(arg debug)" /><arg name="gui" value="$(arg gui)" /><arg name="paused" value="$(arg paused)"/><arg name="use_sim_time" value="$(arg use_sim_time)"/><arg name="headless" value="$(arg headless)"/><arg name="world_name" value="$(find sunday_gazebo)/world/feeding_place.world"/></include><!-- Load the URDF into the ROS Parameter Server --><param name="robot_description" command="$(find xacro)/xacro --inorder '$(find sunday_description)/urdf/sunday.xacro'" /> <!-- Run a python script to the send a service call to gazebo_ros to spawn a URDF robot --><node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"args="-urdf -model sunday -param robot_description"/>
</launch>
配置moveit功能包文件
创建/修改sunday_moveit_config/config/controllers_gazebo.yaml文件,用于配置moveit!控制器接口,代码如下:
controller_manager_ns: controller_manager
controller_list:- name: sunday/arm_joint_controlleraction_ns: follow_joint_trajectorytype: FollowJointTrajectorydefault: truejoints:- joint_1- joint_2- joint_3- joint_4- joint_5- joint_6
修改sunday_moveit_config/launch/sunday_moveit_controller_manager.launch.xml,代码如下:
<launch><!-- loads moveit_controller_manager on the parameter server which is taken as argument if no argument is passed, moveit_simple_controller_manager will be set --><arg name="moveit_controller_manager" default="moveit_simple_controller_manager/MoveItSimpleControllerManager" /><param name="moveit_controller_manager" value="$(arg moveit_controller_manager)"/><!-- loads ros_controllers to the param server --><rosparam file="$(find sunday_moveit_config)/config/controllers_gazebo.yaml"/>
</launch>
创建/修改sunday_moveit_config/launch/moveit_planning_execution.launch,用于加载planning_group等moveit核心功能,代码如下:
<launch><!-- # The planning and execution components of MoveIt! configured to # publish the current configuration of the robot (simulated or real)# and the current state of the world as seen by the planner --><include file="$(find sunday_moveit_config)/launch/move_group.launch"><arg name="publish_monitored_planning_scene" value="true" /></include><!-- # The visualization component of MoveIt! --><include file="$(find sunday_moveit_config)/launch/moveit_rviz.launch"><arg name="config" value="true" /></include><!-- We do not have a robot connected, so publish fake joint states --><node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher"><param name="/use_gui" value="false"/> <rosparam param="/source_list">[/sunday/joint_states]</rosparam></node></launch>
修改sunday_moveit_config/launch/moveit_rviz.launch,使用新版配置工具生成的moveit_rviz.launch文件有些许问题,代码如下:
<launch><arg name="debug" default="false" /><arg unless="$(arg debug)" name="launch_prefix" value="" />
<arg if="$(arg debug)" name="launch_prefix" value="gdb --ex run --args" /><arg name="config" default="false" /><arg unless="$(arg config)" name="command_args" default="" /><arg if="$(arg config)" name="command_args" default="-d $(find sunday_moveit_config)/launch/moveit.rviz" /><node name="$(anon rviz)" launch-prefix="$(arg launch_prefix)" pkg="rviz" type="rviz" respawn="false"args="$(arg command_args)" output="screen"><rosparam command="load" file="$(find sunday_moveit_config)/config/kinematics.yaml"/></node></launch>配置总bringup.launch文件
配置sunday_gazebo/launch/sunday_moveit_bringup.launch,用于加载所有launch文件,代码如下:
<launch><!-- Launch Gazebo --><include file="$(find sunday_gazebo)/launch/sunday_gazebo_world.launch" /><!-- ros_control arm launch file --><include file="$(find sunday_gazebo)/launch/sunday_gazebo_states.launch" /> <!-- ros_control trajectory control dof arm launch file --><include file="$(find sunday_gazebo)/launch/sunday_trajectory_controller.launch" /><!-- moveit launch file --><include file="$(find sunday_moveit_config)/launch/moveit_planning_execution.launch"></include>
</launch>
至此gazebo与moveit功能包配置完毕,将功能包进行编译。sunday_gazebo列表如下
.
├── CMakeLists.txt
├── config
│ ├── sunday_gazebo_joint_states.yaml
│ └── sunday_trajectory_control.yaml
├── include
│ └── sunday_gazebo
├── launch
│ ├── sunday_bringup_moveit.launch
│ ├── sunday_gazebo_states.launch
│ ├── sunday_gazebo_world.launch
│ └── sunday_trajectory_controller.launch
├── package.xml
├── scripts
├── src
└── world└── feeding_place.world
world为配置好的抓取仿真场景。
联合仿真测试
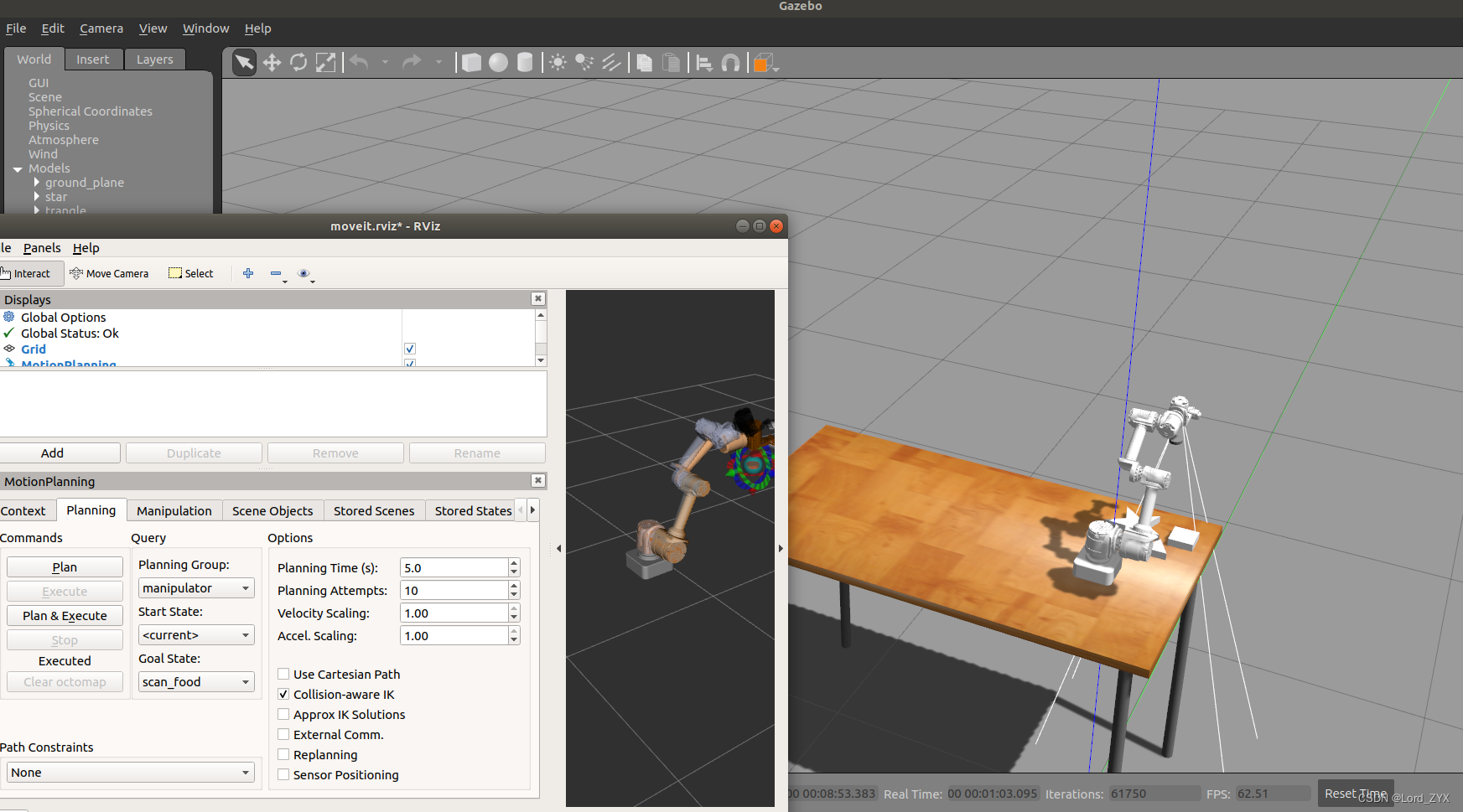
运行代码roslaunch sunday_gazebo sunday_bringup_moveit.launch,可以看到同时加载moveit和gazebo场景,在Query栏,将Goal State设置为scan_food,在Commands栏点击Plan & Execute,可以看到gazebo中的机械臂运行到scan_food姿态。
小结
至此moveit!与gazebo联合仿真配置完毕,配置原理部分不展开介绍,各位可以去古月居学习这部分的原理内容。接下去将讲解如何用yolo训练自己的数据集。
参考资料
1.古月居机械臂课程