网站建设推广 公司百度一下首页极简版
0. 简介
自从ikd-tree出来后,现在越来越多的工作瞄准了增量式这种方法,比如说激光惯导里程计(LIDAR-Inertial Odometry,LIO)的高精度跟踪通常涉及最小化点到平面距离的k最近邻(kNN)搜索,然而,这样做的成本是维护大型局部地图并为每个点执行kNN平面拟合。在《LIO-PPF: Fast LiDAR-Inertial Odometry via Incremental Plane Pre-Fitting and Skeleton Tracking》中,我们通过节省这些不必要的成本来减少LIO的时间和空间复杂度,在技术上设计了一个平面预拟合(PPF)方法来跟踪3D场景的基本框架。在PPF中,平面不是为每个扫描单独拟合的,更不用说为每个点拟合了,而是随着场景“流动”而逐步更新,与kNN不同,PPF对噪声和非严格平面更具有鲁棒性,而且我们采用迭代主成分分析(iPCA)进行优化。此外,还引入了一个简单但有效的夹层,以消除假的点对平面匹配,并且完全开源了代码。
1. 文章贡献
本文中,与在搜索每个点的kNN之后懒惰地拟合平面相比,我们采用了一种更积极的平面预拟合方法。这个想法源于两个不必要的因素:
1)不必要的kNN:当前的LiDAR扫描跟踪[1]-[6]为每个单独的点搜索kNN以拟合平面,假设空间接近的点来自同一平面。然而,这个条件太严格了,即空间上远离的点也可能属于同一个平面,例如长墙。换句话说,kNN策略忽略了平面不总是在小的局部区域内这一事实。对于大平面来说,大多数kNN搜索是冗余的,因为它们最终拟合相同的平面。同时,来自连续LiDAR扫描的点通常来自同一个大平面的不同部分,即它们共享同一个高级别大平面对象。这给了我们一个提示:如果搜索发生在高级特征平面空间中,那么kNN的昂贵成本自然可以被节省。
2)不必要的大型局部地图:如果只保留几个扫描在局部地图中,NN可能会很远,因此很可能属于其他对象,导致kNN不准确地拟合匹配的平面。因此,扩大局部地图以保证足够接近的点对kNN对应关系[5]-[7],如图1d所示。但是,我们注意到:即使只保留一个扫描在局部地图中,缺乏接近的NN≠NN \neqNN= 缺乏平面匹配。例如,在图1b中,大多数橙色墙体点未能在长墙上找到接近的NN,但是这面墙的平面可以轻松地从一个单独的先前扫描中的点(蓝点)预拟合。再次,这给了我们一个提示:如果搜索发生在高级特征平面空间中,一个单独的先前扫描就足以提供足够的点对平面匹配。总之,我们做出以下贡献:
- 我们建议通过LiDAR扫描之间的平面预拟合(PPF)来表示场景的基本骨架进行点匹配。我们证明了(i)PPF可以自然地缩小局部地图并消除大多数冗余的kNN搜索和平面拟合;(ii)kNN对噪声和非严格平面的不鲁棒性。
- 在PPF中,不是为每个点/扫描拟合平面,而是利用IMU和LiDAR扫描的顺序性来实现增量平面更新;迭代PCA使PPF比kNN更具有噪声和非严格平面的鲁棒性;引入了一个简单而有效的夹层来排除错误的点对平面匹配。
- 工程贡献包括完全开源的LIO-PPF。在5个开放数据集的22个序列上进行的实验表明,与原始方法相比,我们的PPF最多可以将本地地图大小减小64%,在残差计算方面实现4倍的加速,最多实现1.92倍的总体FPS,并仍然显示相同水平的精度。

图1. (a) 重建的场景。(b) 在快速旋转下(a)的两个连续扫描。© 跨越扫描的大面形成了场景的基本骨架,并揭示了其整体几何结构。(d) kNN需要大型的局部地图,否则大多数点无法找到邻居来拟合平面。而我们使用基本骨架来表示场景以进行点匹配。搜索区域扩大到平面级别,不需要kNN搜索。
2. 符号和预备知识
在本文中,我们将世界坐标系表示为WWW,LiDAR坐标系表示为LLL,IMU体坐标系表示为BBB。令PiP_iPi表示从扫描i接收到的去畸变的LiDAR点。一个3D平面可以由其法向量n∈R3n∈\mathbb{R}^3n∈R3和其中任意一点p∈R3p∈\mathbb{R}^3p∈R3来确定,或者更简洁地通过一个4维向量f=[nT,d]Tf=[n^T,d]^Tf=[nT,d]T来确定,使得f⋅p~=0f· \tilde{p}=0f⋅p~=0,其中p~=[pT,1]T\tilde{p}=[p^T,1]^Tp~=[pT,1]T。我们用变换矩阵T∈SE(3)T∈SE(3)T∈SE(3)来表示6自由度姿态,其中包含旋转矩阵R∈SO(3)R∈SO(3)R∈SO(3)和平移向量t∈R3t∈\mathbb{R}^3t∈R3。
定理1:fff经过TTT的变换为:

证明:设 p~\tilde{p}p~ 是 fff 上的任意一点,且 p~′\tilde{p}^′p~′ 是其通过 TTT 变换后得到的对应点,即p~′=Tp~\tilde{p}^′ = T \tilde{p}p~′=Tp~。那么我们有:

这意味着p~′\tilde{p}^′p~′在f′f^′f′上。
下面我们将会介绍本文高效平面预拟合方法。然后,我们描述基于PPF的对应骨架跟踪算法。最后,提出了一个三明治层,以使算法在复杂场景中更加鲁棒。
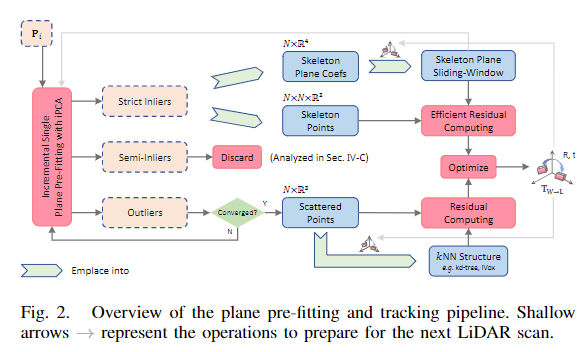
图2. 预拟合平面和跟踪流程的概览。浅箭头 → 表示为准备下一个激光雷达扫描而进行的操作。