天津网站建设渠道360排名检测
一、前言
随着对可再生能源的需求不断增长,太阳能作为一种清洁、可持续的能源形式,受到越来越多的关注和应用。太阳能光板通常固定在一个固定的角度上,这限制了它们对太阳光的接收效率。为了充分利用太阳能资源,提高太阳能光板的收集效率,需要设计一个能够自动跟踪太阳光的系统。
本项目采用基于单片机的设计方案,主控芯片选择STC89C52。在太阳能光板的四个角上,安装了四个光敏电阻,它们用于检测四个方向太阳光的最强位置。每个光敏电阻通过PCF8591模块与主控芯片相连,利用模数转换器(ADC)采集各个通道的数据值。
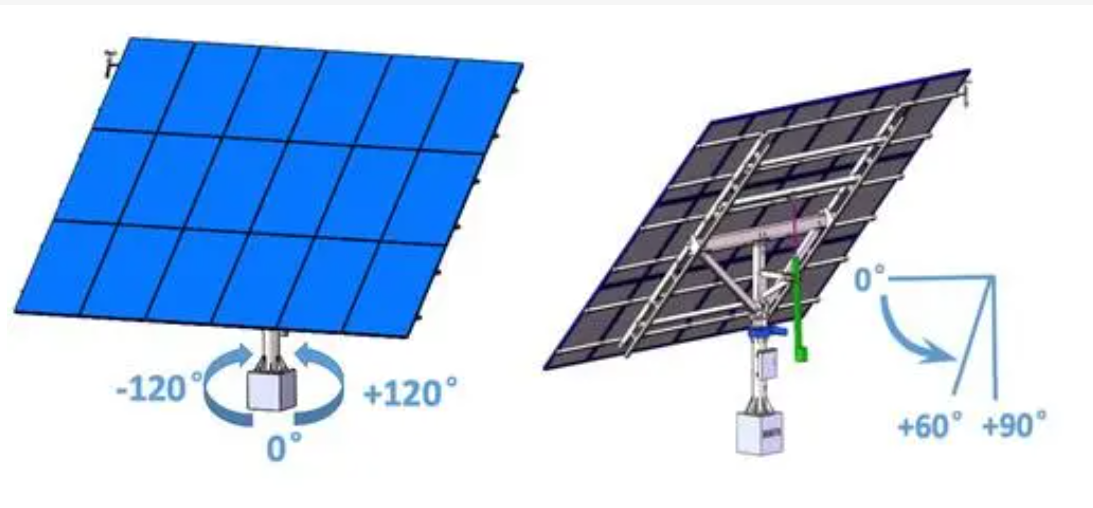
通过对四个光敏传感器采集到的数据进行处理和比较,主控芯片能够确定太阳光的最强位置所在。然后,通过控制两个28BYJ-48-5V步进电机的运动,太阳能光板可以实现左右和上下方向的旋转。通过调整太阳能光板的倾斜角度,使其与太阳光保持垂直,以获得最大的太阳能收集效率。
该太阳能跟踪器的设计旨在实现自动化的太阳光追踪,以提高太阳能光板的能源收集效率。通过使用光敏电阻、ADC转换和步进电机控制等技术手段,系统能够准确地确定太阳光的位置,并自动调整太阳能光板的朝向。这将大大提高太阳能系统的能源输出,并为可再生能源的利用做出贡献。

二、系统设计思路
2.1 硬件选型
【1】主控芯片:STC89C52 STC89C52是一款高性价比的单片机,具有丰富的外设和强大的计算能力。采用基于MCS-51内核的8位单片机架构,拥有存储容量大(8KB Flash和256B RAM)和丰富的IO口(32个),适合控制太阳能跟踪器系统的各种功能。
【2】光敏电阻:选择具有高灵敏度和较小尺寸的光敏电阻,并根据光照条件进行选择。通过与PCF8591模块连接,可以将光敏电阻的电阻值变化转换为相应的模拟电压信号。
【3】ADC模块:PCF8591 PCF8591是一款常用的4通道12位ADC模块,适用于将模拟信号转换为数字信号。通过连接4个光敏电阻到PCF8591的4个输入通道上,可以实现数据的采集和转换。
【4】步进电机:28BYJ-48-5V 28BYJ-48-5V步进电机是一个小型、低功耗的步进电机,适用于低速应用。使用两个步进电机可以控制太阳能光板在水平和垂直方向上的旋转,为太阳能跟踪器提供多个方向的调整。
2.2 设计思路
【1】硬件连接:根据项目需求,将STC89C52主控芯片与PCF8591模块、ULN2003驱动模块、28BYJ-48-5V步进电机、光敏电阻等进行正确的引脚连接。
【2】初始化设置:在主函数开始部分,进行必要的初始化设置,例如设置I/O口方向、定义引脚连接、初始化I2C总线等。
【3】光敏电阻采集:通过PCF8591模块采集4个光敏电阻的数据。使用I2C通信协议,向PCF8591模块发送控制字节,选择光敏电阻通道,并通过ADC转换获取光敏电阻的数值。将采集到的数据存储在名为lightSensor的数组中,每个元素对应一个光敏电阻通道。
【4】确定最强光位置:根据采集到的光敏电阻数据,通过比较找到最强光的位置。遍历lightSensor数组,记录最大值的索引,表示最强光所在的方向。
【5】步进电机控制:根据最强光的位置控制步进电机的旋转,使太阳能光板朝向最大光的方向。根据最大光位置的索引,使用条件语句判断旋转方向,然后调用StepperMotor_Rotate函数控制步进电机旋转。根据需求,可以设置旋转步数和旋转方向,以实现精确的转动控制。
【6】延时等待:在步进电机旋转完成后,可以添加适当的延时,以等待太阳能光板调整到新的位置。可以根据实际情况调整延时时间,确保光板稳定后进行下一次采集和控制。
【7】循环执行:将上述步骤放置在一个无限循环中,以实现持续的太阳能跟踪。程序将不断采集光敏电阻数据、确定最强光位置,并通过步进电机控制太阳能光板旋转,以获得最大的太阳能收集效率。
三、项目代码
3.1 PCF8591采集代码
以下是利用PCF8591的光敏电阻采集并通过串口打印的实现代码。
#include <reg52.h>
#include <intrins.h>// 定义PCF8591模块地址
#define PCF8591_ADDR 0x90// 定义光敏电阻通道
#define LDR_CHANNEL_1 0x00
#define LDR_CHANNEL_2 0x01
#define LDR_CHANNEL_3 0x02
#define LDR_CHANNEL_4 0x03// 定义波特率
#define BAUDRATE 9600// 函数声明
void delay(unsigned int time);
void uartInit();
void uartSendByte(unsigned char dat);
void uartSendString(unsigned char *str);
void pcf8591Init();
unsigned char pcf8591ReadChannel(unsigned char channel);void main() {unsigned char ldr1, ldr2, ldr3, ldr4;unsigned char str[20];uartInit(); // 初始化串口pcf8591Init(); // 初始化PCF8591模块while(1) {// 读取光敏电阻数据ldr1 = pcf8591ReadChannel(LDR_CHANNEL_1);ldr2 = pcf8591ReadChannel(LDR_CHANNEL_2);ldr3 = pcf8591ReadChannel(LDR_CHANNEL_3);ldr4 = pcf8591ReadChannel(LDR_CHANNEL_4);// 打印光敏电阻数据到串口sprintf(str, "LDR1: %d, LDR2: %d, LDR3: %d, LDR4: %d\r\n", ldr1, ldr2, ldr3, ldr4);uartSendString(str);delay(1000); // 延时一段时间后再进行下一次采集和打印}
}// 延时函数
void delay(unsigned int time) {unsigned int i, j;for(i = 0; i < time; i++) {for(j = 0; j < 125; j++);}
}// 初始化串口
void uartInit() {TMOD = 0x20; // 设置定时器1为模式2SCON = 0x50; // 设置串口工作方式1,允许接收TH1 = 256 - _cror(_cror(FOSC/12, 4), 4) / BAUDRATE; // 设置波特率TR1 = 1; // 启动定时器1
}// 串口发送单个字节
void uartSendByte(unsigned char dat) {SBUF = dat;while (!TI); // 等待发送完成TI = 0; // 清除发送完成标志位
}// 串口发送字符串
void uartSendString(unsigned char *str) {while (*str) {uartSendByte(*str);str++;}
}// 初始化PCF8591模块
void pcf8591Init() {// 发送启动转换命令I2C_Start(); I2C_Send_Byte(PCF8591_ADDR); // 发送设备地址I2C_Wait_Ack();I2C_Send_Byte(0x40); // 发送转换命令,选择通道0I2C_Wait_Ack();I2C_Stop();
}// 读取PCF8591模块的指定通道的数据值
unsigned char pcf8591ReadChannel(unsigned char channel) {unsigned char value;I2C_Start();I2C_Send_Byte(PCF8591_ADDR); // 发送设备地址I2C_Wait_Ack();I2C_Send_Byte(channel); // 发送通道号I2C_Wait_Ack();I2C_Start(); // 重新启动I2C_Send_Byte(PCF8591_ADDR + 1); // 发送读取命令I2C_Wait_Ack();value = I2C_Read_Byte(); // 读取数据I2C_Send_NAck();I2C_Stop();return value;
}3.2 主项目框架代码
#include <reg52.h>// 定义PCF8591模块的引脚连接
#define PCF8591_ADDRESS 0x90 // PCF8591模块的I2C地址
#define PCF8591_CONTROL 0x00 // PCF8591模块的控制寄存器地址// 定义步进电机的引脚连接
sbit IN1 = P1^0; // 步进电机引脚1
sbit IN2 = P1^1; // 步进电机引脚2
sbit IN3 = P1^2; // 步进电机引脚3
sbit IN4 = P1^3; // 步进电机引脚4// 定义步进电机旋转方向
#define CW 0 // 顺时针
#define CCW 1 // 逆时针// 定义光敏电阻通道
#define CHANNEL_0 0 // 光敏电阻通道0
#define CHANNEL_1 1 // 光敏电阻通道1
#define CHANNEL_2 2 // 光敏电阻通道2
#define CHANNEL_3 3 // 光敏电阻通道3// 延时函数
void delay(unsigned int ms) {unsigned int i, j;for (i = ms; i > 0; i--)for (j = 110; j > 0; j--);
}// I2C总线启动
void I2C_Start() {SDA = 1;SCL = 1;delay(1);SDA = 0;delay(1);SCL = 0;delay(1);
}// I2C总线停止
void I2C_Stop() {SDA = 0;SCL = 1;delay(1);SDA = 1;delay(1);
}// I2C发送一个字节的数据
void I2C_SendByte(unsigned char dat) {unsigned char i;for (i = 0; i < 8; i++) {SDA = (dat & 0x80) >> 7;dat <<= 1;delay(1);SCL = 1;delay(1);SCL = 0;delay(1);}SDA = 1;delay(1);SCL = 1;delay(1);while (SDA) continue;SCL = 0;
}// 从PCF8591读取一个字节的数据
unsigned char PCF8591_ReadByte() {unsigned char i, dat = 0;SDA = 1;for (i = 0; i < 8; i++) {dat <<= 1;SCL = 0;delay(1);SCL = 1;delay(1);if (SDA) dat |= 0x01;}SCL = 0;return dat;
}// 设置PCF8591的控制字节
void PCF8591_SetControl(unsigned char ctrl) {I2C_Start();I2C_SendByte(PCF8591_ADDRESS);I2C_SendByte(PCF8591_CONTROL);I2C_SendByte(ctrl);I2C_Stop();
}// 读取光敏电阻的数据
unsigned int ReadLightSensor(unsigned char channel) {unsigned int value;PCF8591_SetControl(0x40 | channel); // 选择光敏电阻通道delay(10); // 延时等待转换完成I2C_Start();I2C_SendByte(PCF8591_ADDRESS | 0x01); // 续上一段value = PCF8591_ReadByte(); // 读取高字节value = (value << 8) + PCF8591_ReadByte(); // 读取低字节I2C_Stop();return value;
}// 控制步进电机旋转
void StepperMotor_Rotate(unsigned char direction, unsigned int steps) {unsigned int i;for (i = 0; i < steps; i++) {// 顺时针旋转if (direction == CW) {IN1 = 1; IN2 = 0; IN3 = 0; IN4 = 0;delay(10);IN1 = 0; IN2 = 1; IN3 = 0; IN4 = 0;delay(10);IN1 = 0; IN2 = 0; IN3 = 1; IN4 = 0;delay(10);IN1 = 0; IN2 = 0; IN3 = 0; IN4 = 1;delay(10);}// 逆时针旋转else if (direction == CCW) {IN1 = 0; IN2 = 0; IN3 = 0; IN4 = 1;delay(10);IN1 = 0; IN2 = 0; IN3 = 1; IN4 = 0;delay(10);IN1 = 0; IN2 = 1; IN3 = 0; IN4 = 0;delay(10);IN1 = 1; IN2 = 0; IN3 = 0; IN4 = 0;delay(10);}}
}// 主函数
void main() {unsigned int lightSensor[4];unsigned char maxIndex;while (1) {// 采集光敏电阻数据lightSensor[0] = ReadLightSensor(CHANNEL_0);lightSensor[1] = ReadLightSensor(CHANNEL_1);lightSensor[2] = ReadLightSensor(CHANNEL_2);lightSensor[3] = ReadLightSensor(CHANNEL_3);// 确定最强光位置maxIndex = 0;if (lightSensor[1] > lightSensor[maxIndex]) maxIndex = 1;if (lightSensor[2] > lightSensor[maxIndex]) maxIndex = 2;if (lightSensor[3] > lightSensor[maxIndex]) maxIndex = 3;// 控制步进电机旋转if (maxIndex == 0) {StepperMotor_Rotate(CW, 100); // 右转} else if (maxIndex == 1) {StepperMotor_Rotate(CCW, 100); // 左转} else if (maxIndex == 2) {StepperMotor_Rotate(CW, 100); // 右转StepperMotor_Rotate(CW, 100); // 右转} else if (maxIndex == 3) {StepperMotor_Rotate(CCW, 100); // 左转StepperMotor_Rotate(CCW, 100); // 左转}delay(1000); // 延时一段时间}
}