博物馆网站建设公司新品怎么刷关键词
ur3+robotiq 2f 140配置moveit
参考链接1
参考链接2
官方配置movit教程
搭建环境:
ubuntu: 20.04
ros: Nonetic
sensor: robotiq_ft300
gripper: robotiq_2f_140_gripper
UR: UR3
reasense: D435i
通过下面几篇博客配置好了ur3、力传感器、robotiq夹爪、realsense的rviz和gazebo仿真环境
ubuntu20.04配置UR机械臂的仿真环境
ur3+robotiq ft sensor+robotiq 2f 140配置rviz仿真环境
ur3+robotiq ft sensor+robotiq 2f 140配置gazebo仿真环境
ur3+robotiq ft sensor+robotiq 2f 140+realsense d435i配置rviz,gazebo仿真环境
gazebo仿真环境中添加robotiq 2f 140的gripper_controller控制器
下面来配置ur3机械臂和夹爪的moveit
运行命令
roslaunch moveit_setup_assistant setup_assistant.launch
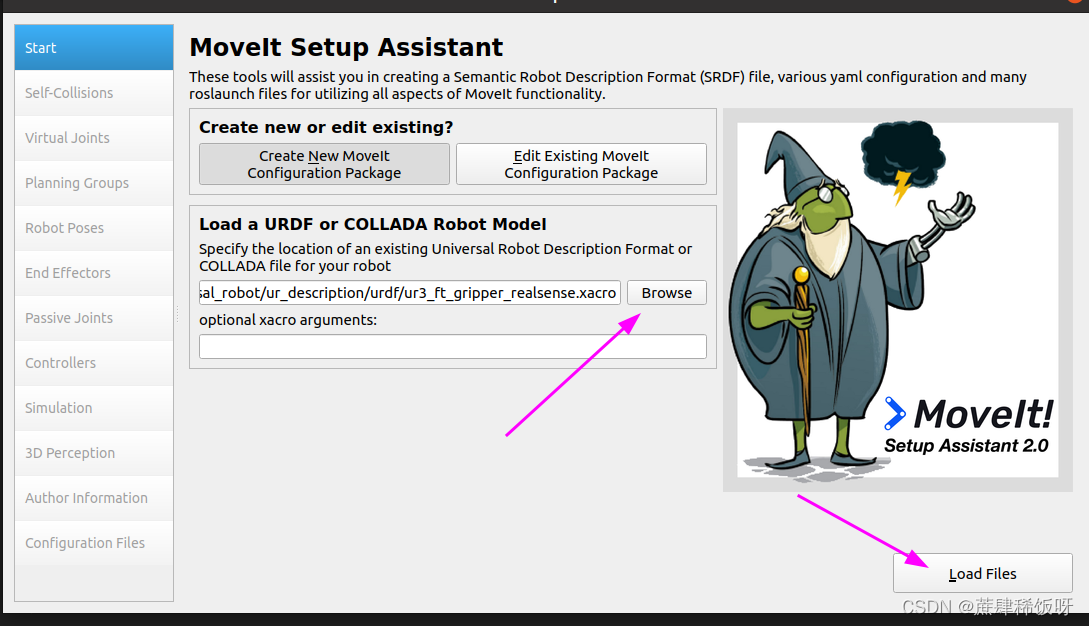
选择创建新的movit配置文件,导入之前配好的描述文件,我导入的是universal_robot/ur_description/urdf/ur3_ft_gripper_realsense.xacro
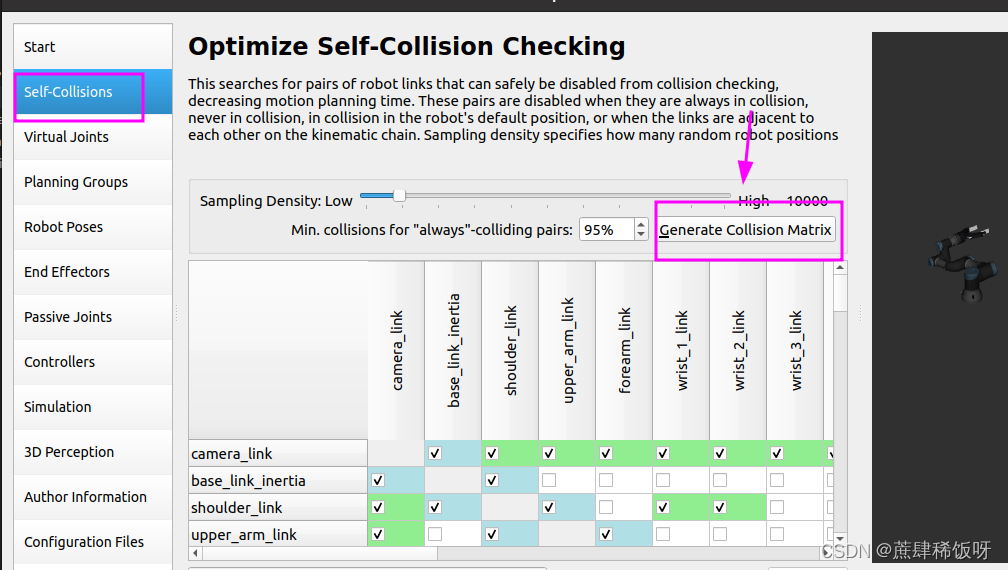
选择生成碰撞矩阵
配置虚拟关节
这里我没有配置虚拟关节,跳过
创建规划组
点击Add Group添加组
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-UJHGTzHQ-1677226598177)(https://cdn.jsdelivr.net/gh/FinnJob/blog-pic/img/20230224151358.png)]](https://img-blog.csdnimg.cn/6f46665a67b14b3eb3e9221dce0305e9.png)
- 添加ur3机械臂planning组,相关配置如下
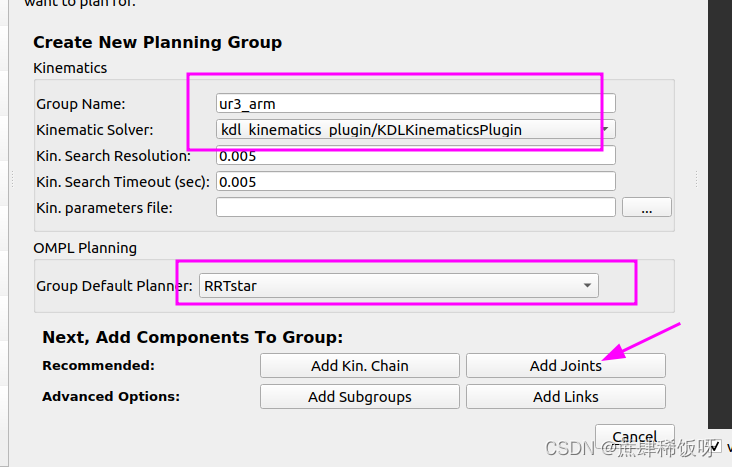
点击Add Joints,添加关节如下,添加完关节后选择chain后点击edit select
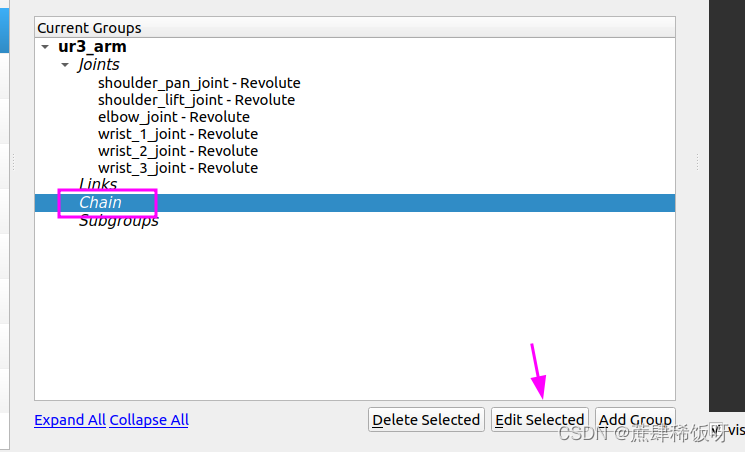
配置如下图
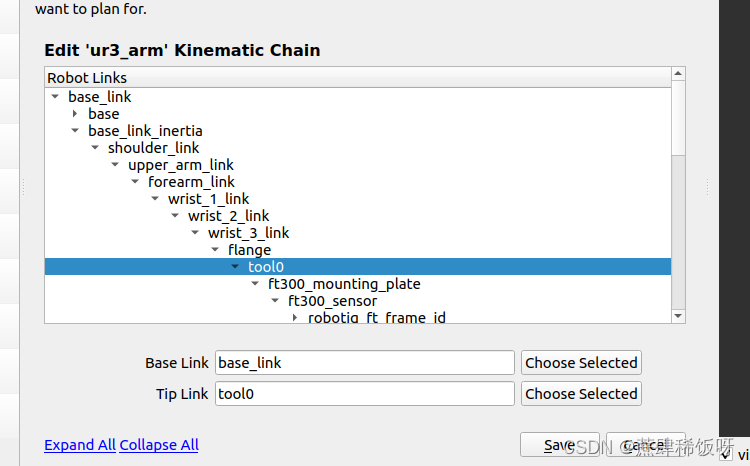
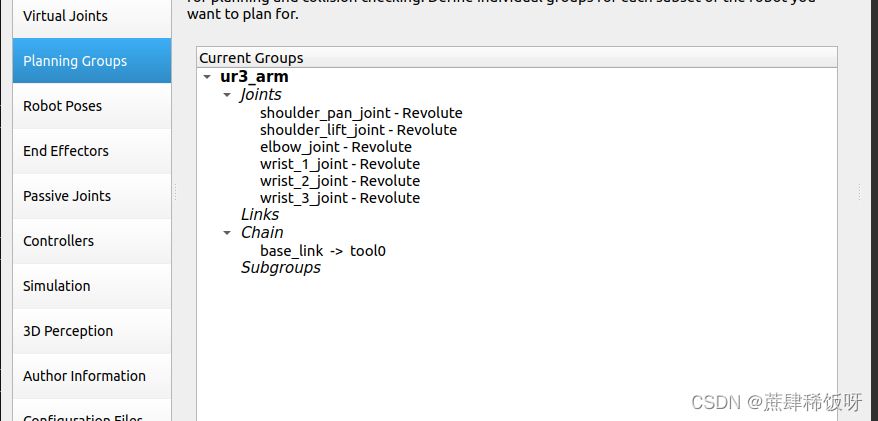
最终配置
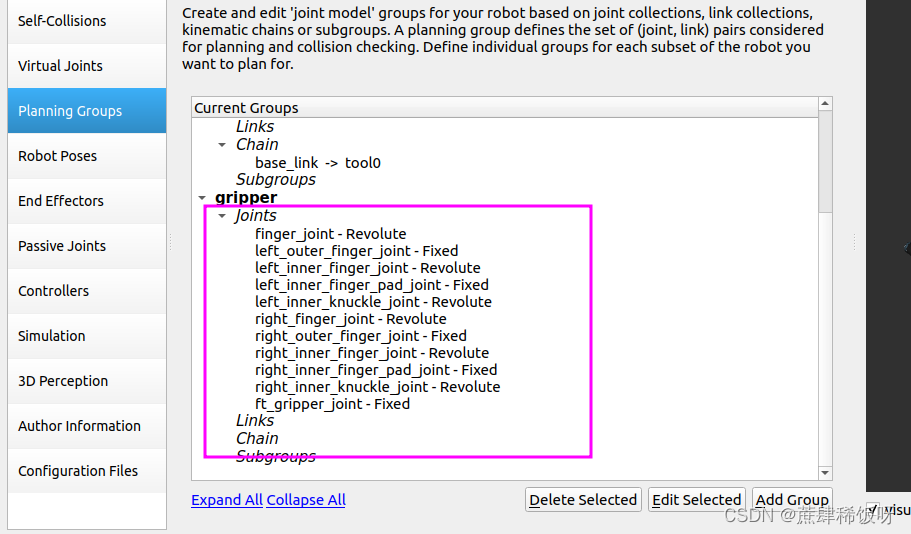
- 添加robotiq 2f 140夹爪planning组,相关配置如下
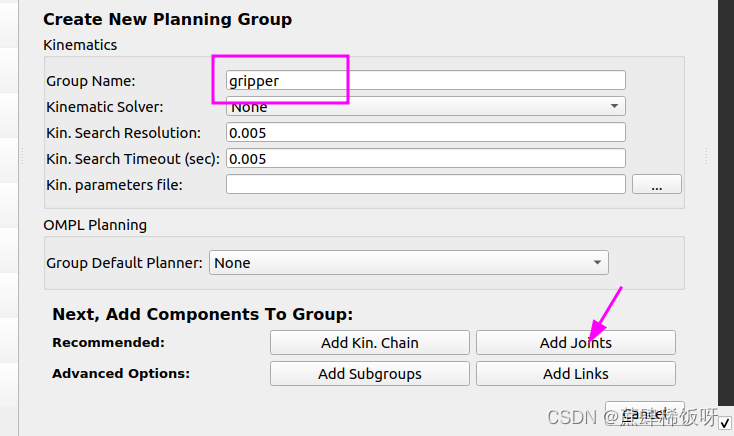
点击Add Joints,添加关节如下所示
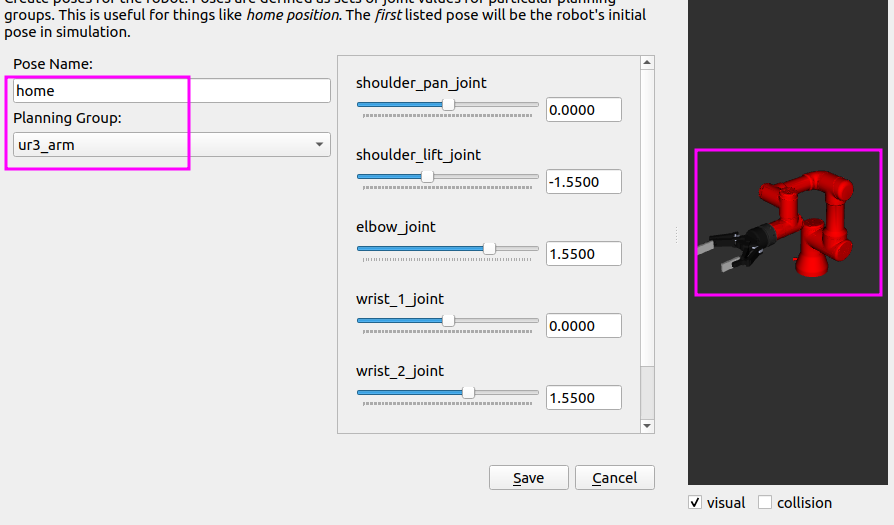
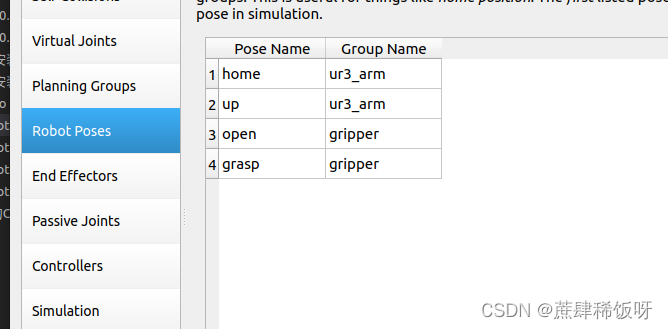
定义机器人位姿
- 设置home
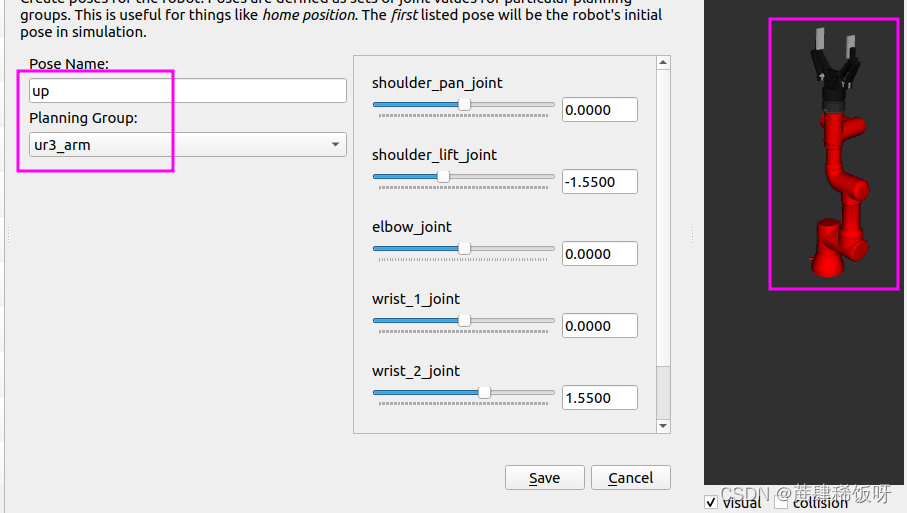
- 设置机械臂立起来up
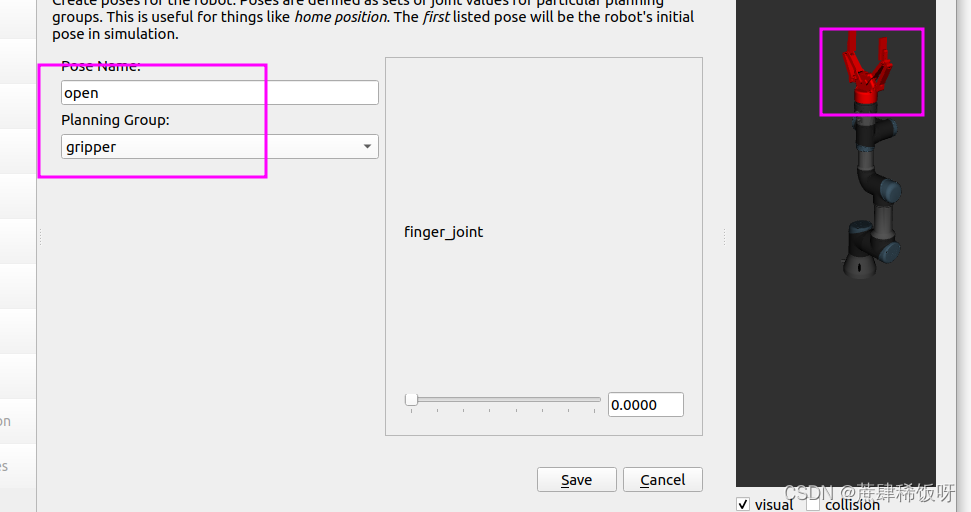
- 设置打开夹爪open
- 设置加紧夹爪grasp

最终save
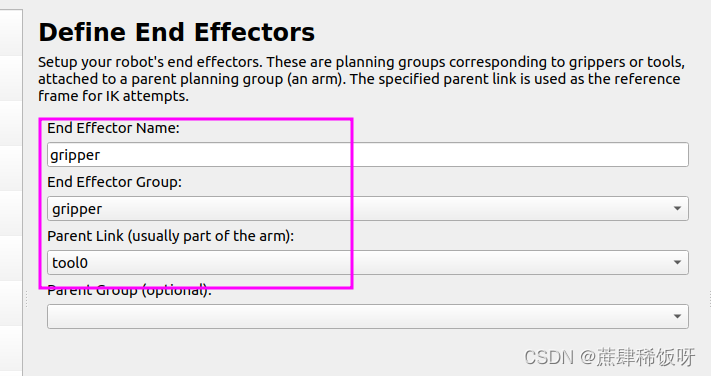
设置末端执行器
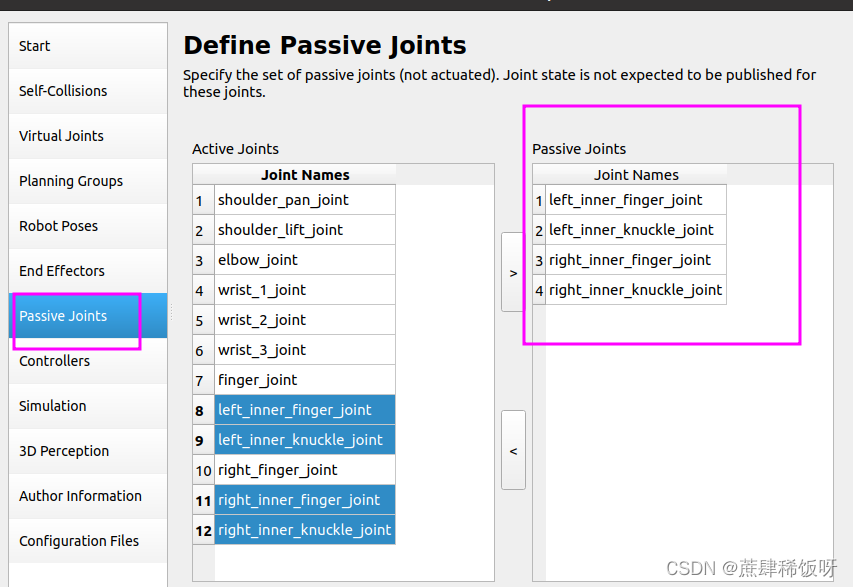
设置无用关节
也就是一些被动关节,没有驱动的那种,也不需要它发布joint_state。选择夹爪的一些被动关节
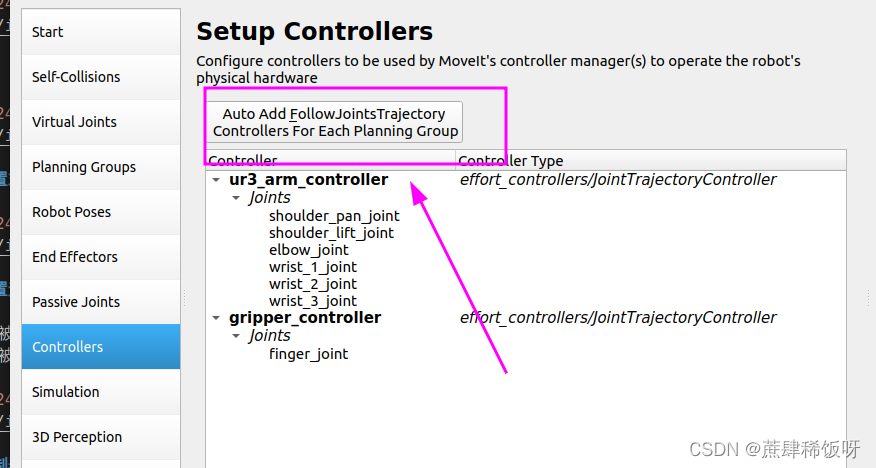
控制器设置
直接点左上角的自动生成,生成的是group名字加上controller
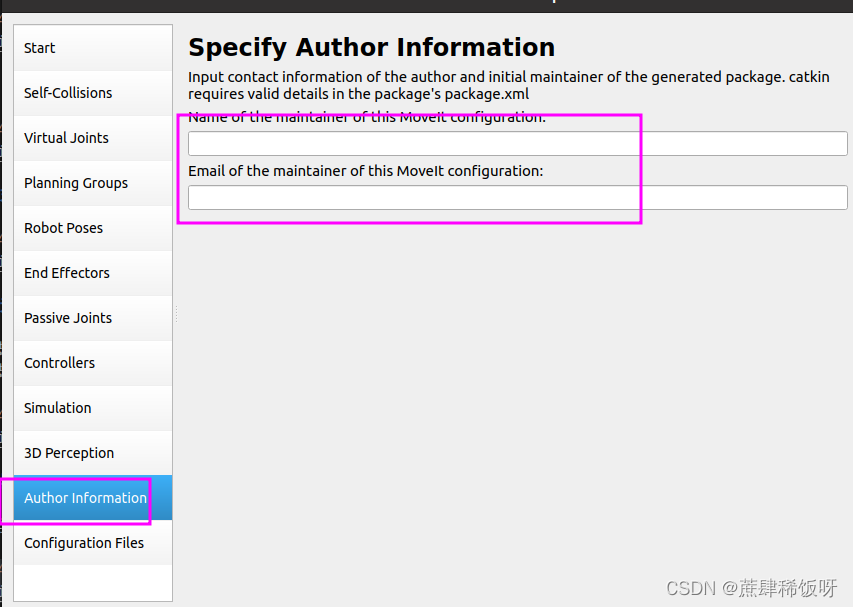
加上信息
可以随便写,每加上不给生成
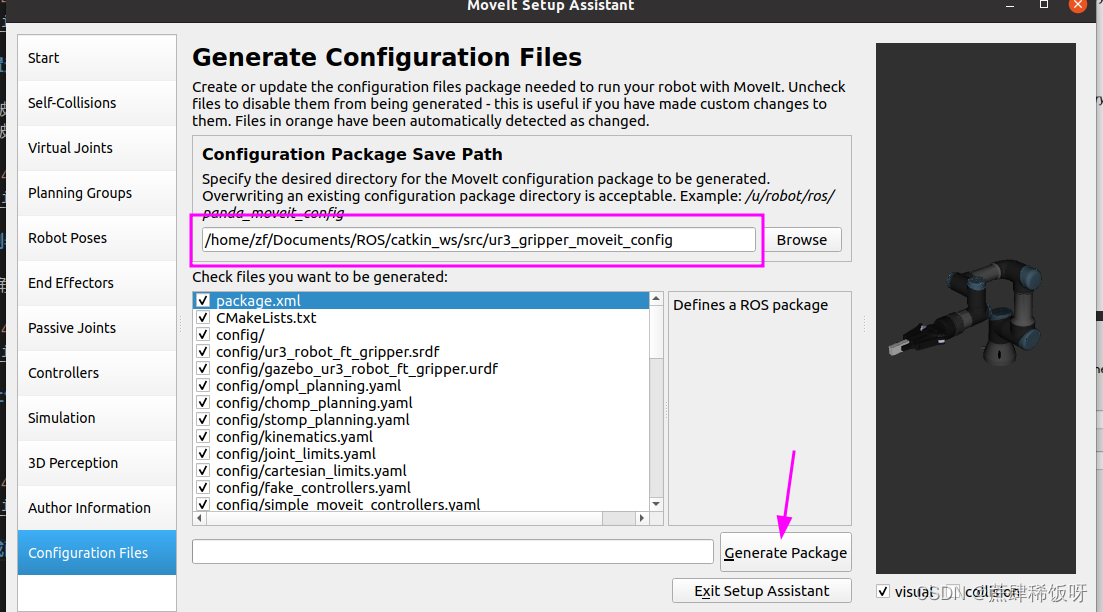
生成配置文件
选择存放配置文件的路径,点击生成
生成配置文件后,有许多地方是不对的,需要手动改一下bug
- bug1
Error [parser.cc:488] parse as old deprecated model file failed.
Error Code 4 Msg: Required attribute[filename] in element[plugin] is not specified in SDF.
Error Code 8 Msg: Error reading element <plugin>
Error Code 8 Msg: Error reading element <model>
Error Code 8 Msg: Error reading element <sdf>
解决办法:
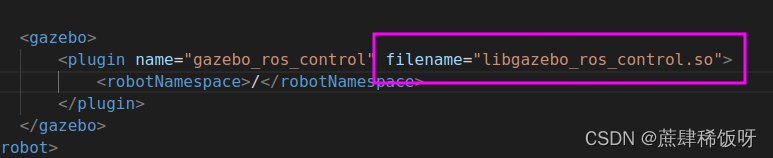
检查你的urdf模型文件的最后,看其是否少了 "filename=“libgazebo_ros_control.so” ,我就是少了这个而报错,可能是因为 gazebo_ros_control 这个plugin没有继承libgazebo_ros_control.so
我的这个urdf文件是生成的配置文件里面的ur3_gripper_moveit_config/config/gazebo_ur3_robot_ft_gripper.urdf,然后在里面加上,如下图
展示效果
- 展示rviz
运行命令
cd ~/catkin_ws
source devel/setup.bash
roslaunch ur3_gripper_moveit_config demo.launch
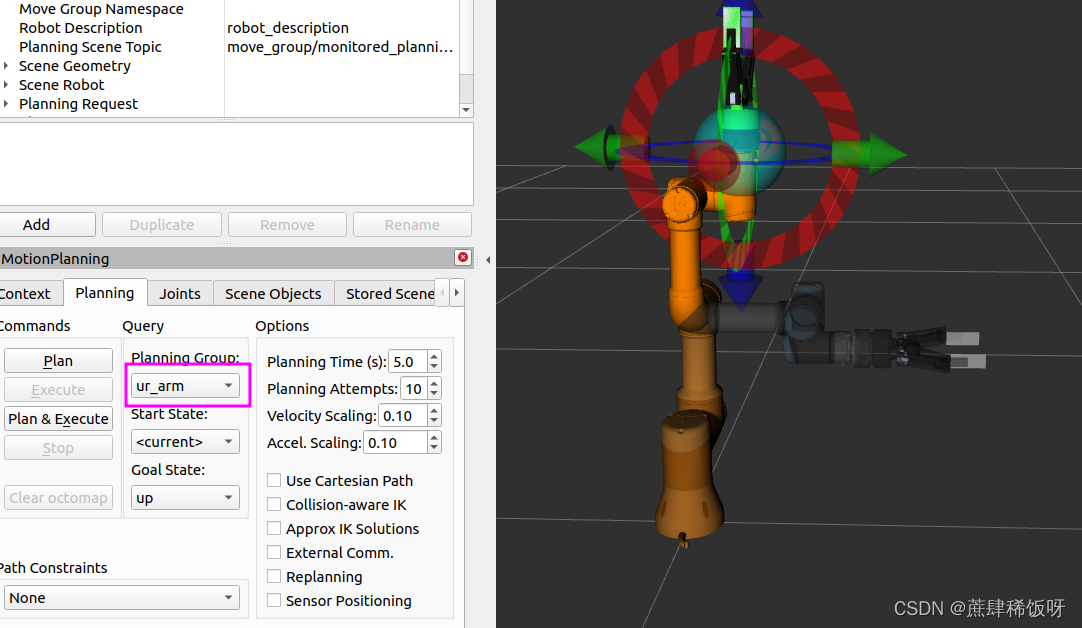
选择机械臂或者夹爪,可以在rviz中做路径规划
- 展示rviz和gazebo
运行命令
cd ~/catkin_ws
source devel/setup.bash
roslaunch ur3_gripper_moveit_config demo_gazebo.launch
可以看到机械臂在gazebo中一直在跳舞,原因未知