网站备案要网站做才可以使用吗建站企业网站
目录
文章目录
- 目录
- 摘要
- 1.源码
- 1.1源码路径
- 1.2源码程序
- 1.3源码功能
- 2.源码分析
摘要
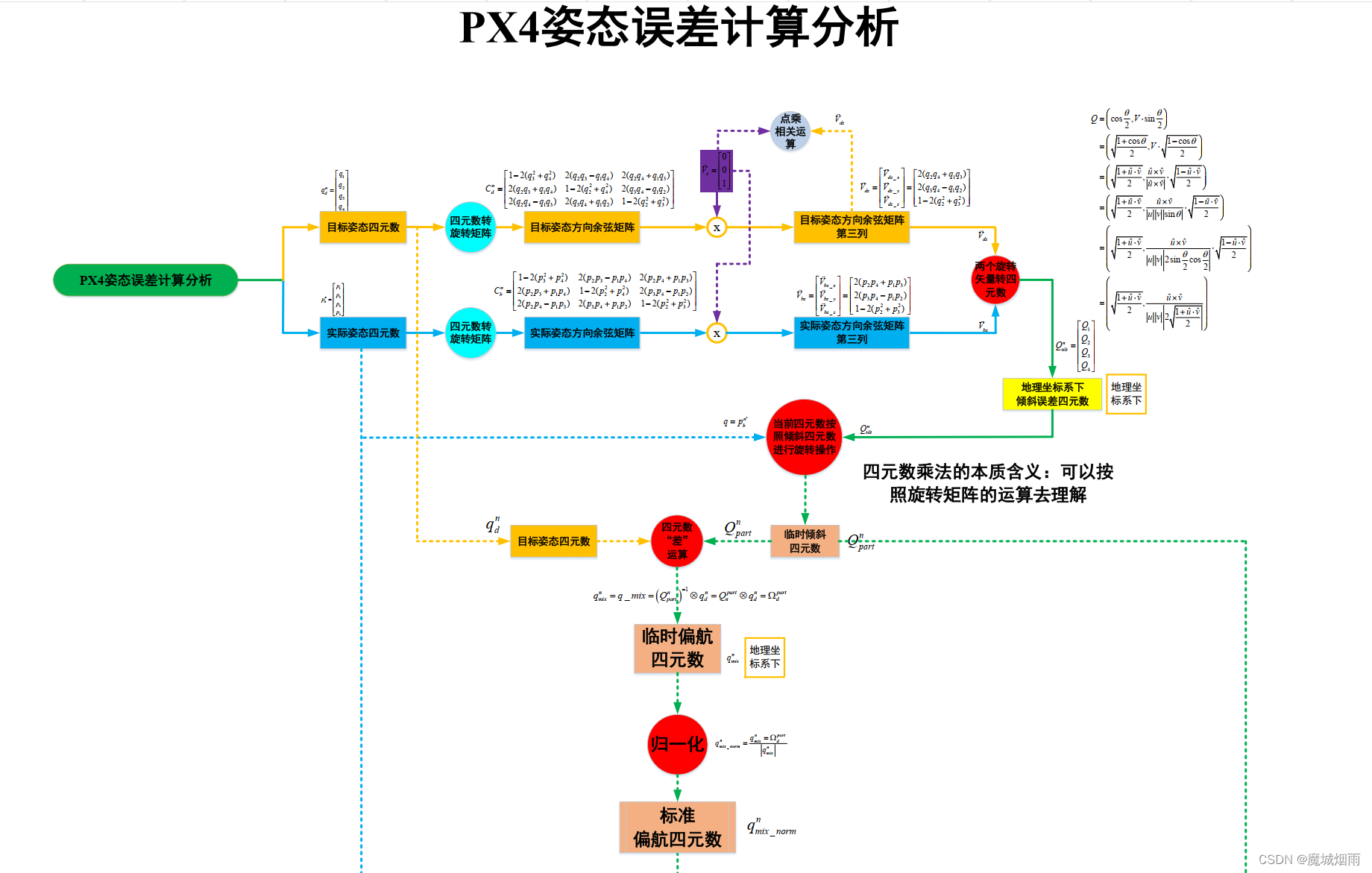
本节主要记录PX4姿态误差计算过程,欢迎批评指正。
1.源码
1.1源码路径
PX4-Autopilot/src/modules/mc_att_control/AttitudeControl/AttitudeControl.cpp
1.2源码程序
matrix::Vector3f AttitudeControl::update(const Quatf &q) const
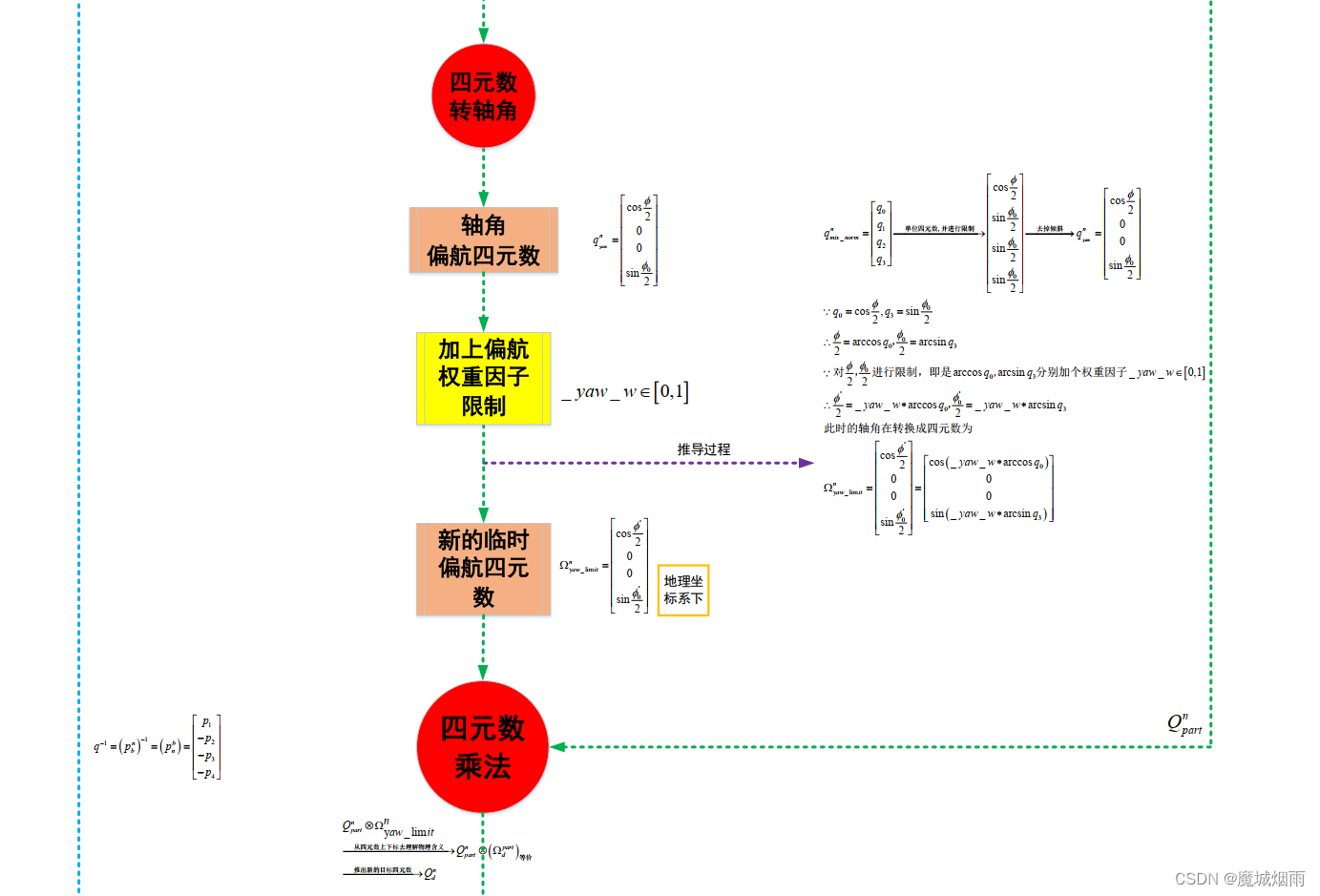
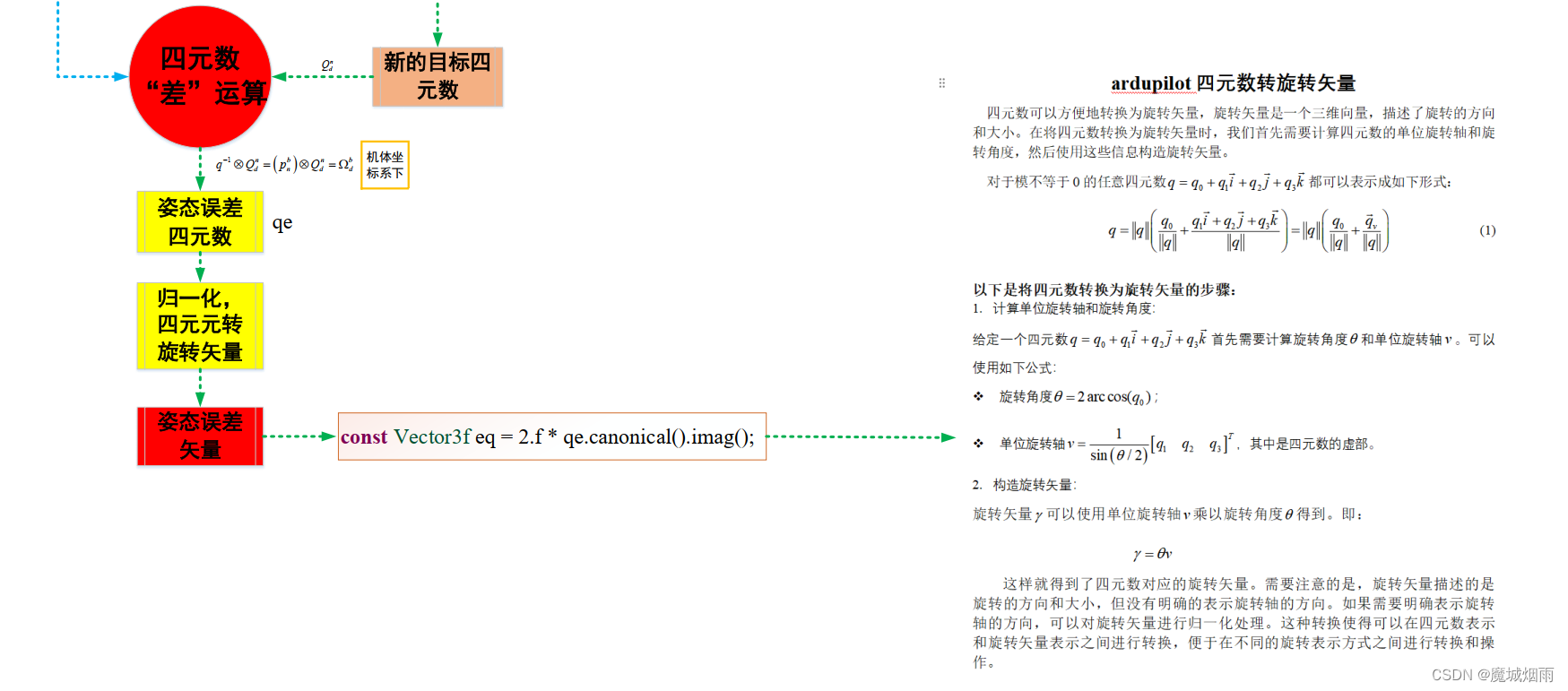
{Quatf qd = _attitude_setpoint_q;// calculate reduced desired attitude neglecting vehicle's yaw to prioritize roll and pitchconst Vector3f e_z = q.dcm_z();const Vector3f e_z_d = qd.dcm_z();Quatf qd_red(e_z, e_z_d);if (fabsf(qd_red(1)) > (1.f - 1e-5f) || fabsf(qd_red(2)) > (1.f - 1e-5f)){// In the infinitesimal corner case where the vehicle and thrust have the completely opposite direction,// full attitude control anyways generates no yaw input and directly takes the combination of// roll and pitch leading to the correct desired yaw. Ignoring this case would still be totally safe and stable.qd_red = qd;} else{// transform rotation from current to desired thrust vector into a world frame reduced desired attitudeqd_red *= q;}// mix full and reduced desired attitudeQuatf q_mix = qd_red.inversed() * qd;q_mix.canonicalize();// catch numerical problems with the domain of acosf and asinfq_mix(0) = math::constrain(q_mix(0), -1.f, 1.f);q_mix(3) = math::constrain(q_mix(3), -1.f, 1.f);qd = qd_red * Quatf(cosf(_yaw_w * acosf(q_mix(0))), 0, 0, sinf(_yaw_w * asinf(q_mix(3))));// quaternion attitude control law, qe is rotation from q to qdconst Quatf qe = q.inversed() * qd;// using sin(alpha/2) scaled rotation axis as attitude error (see quaternion definition by axis angle)// also taking care of the antipodal unit quaternion ambiguityconst Vector3f eq = 2.f * qe.canonical().imag();// calculate angular rates setpointVector3f rate_setpoint = eq.emult(_proportional_gain);// Feed forward the yaw setpoint rate.// yawspeed_setpoint is the feed forward commanded rotation around the world z-axis,// but we need to apply it in the body frame (because _rates_sp is expressed in the body frame).// Therefore we infer the world z-axis (expressed in the body frame) by taking the last column of R.transposed (== q.inversed)// and multiply it by the yaw setpoint rate (yawspeed_setpoint).// This yields a vector representing the commanded rotatation around the world z-axis expressed in the body frame// such that it can be added to the rates setpoint.if (std::isfinite(_yawspeed_setpoint)){rate_setpoint += q.inversed().dcm_z() * _yawspeed_setpoint;}// limit ratesfor (int i = 0; i < 3; i++){rate_setpoint(i) = math::constrain(rate_setpoint(i), -_rate_limit(i), _rate_limit(i));}return rate_setpoint;
}
1.3源码功能
实现姿态误差计算,得到目标角速度。
2.源码分析
对应的PDF下载地址:
下载地址