网站开发技术教程整合营销策划方案
使用ros_arduino_bridge控制机器人底盘
搭建了ROS分布式环境后,将ros_arduino_bridge功能包上传至Jetson nano,就可以在PC端通过键盘控制小车的运动了。实现流程如下:
- 系统准备;
- 下载程序;
- 程序修改;
- 分别启动PC与Jetson nano端相关节点,并实现运动控制。
1 系统准备
ros_arduino_bridge是依赖于python-serial功能包的,需要在Jetson nano端安装该功能包,安装命令:
sudo apt-get install python-serial
2 下载程序
使用git命令从仓库中下载程序。
https://gitee.com/xu783462354/ros_arduino_bridge.git
3 程序修改
ros_arduino_bridge的ROS端功能包主要是使用 ros_arduino_python,程序入口是该包launch目录下的arduino.launch文件,内容如下:
<launch><node name="arduino" pkg="ros_arduino_python" type="arduino_node.py" output="screen"><rosparam file="$(find ros_arduino_python)/config/my_arduino_params.yaml" command="load" /></node>
</launch>
需要载入yaml格式的配置文件,该文件在 config 目录下已经提供了模板,只需要复制文件并按需配置即可,复制文件并重命名,配置如下:
# For a direct USB cable connection, the port name is typically
# /dev/ttyACM# where is # is a number such as 0, 1, 2, etc
# For a wireless connection like XBee, the port is typically
# /dev/ttyUSB# where # is a number such as 0, 1, 2, etc.port: /dev/ttyUSB0
baud: 57600
timeout: 0.1rate: 50
sensorstate_rate: 10use_base_controller: True
base_controller_rate: 10# For a robot that uses base_footprint, change base_frame to base_footprint
base_frame: base_footprint# === Robot drivetrain parameters
wheel_diameter: 0.065
wheel_track: 0.155
encoder_resolution: 1560 # from Pololu for 131:1 motors
#gear_reduction: 1.0
#motors_reversed: True# === PID parameters
Kp: 2
Kd: 15
Ki: 0
Ko: 50
accel_limit: 1.0# === Sensor definitions. Examples only - edit for your robot.
# Sensor type can be one of the follow (case sensitive!):
# * Ping
# * GP2D12
# * Analog
# * Digital
# * PololuMotorCurrent
# * PhidgetsVoltage
# * PhidgetsCurrent (20 Amp, DC)sensors: {#motor_current_left: {pin: 0, type: PololuMotorCurrent, rate: 5},#motor_current_right: {pin: 1, type: PololuMotorCurrent, rate: 5},#ir_front_center: {pin: 2, type: GP2D12, rate: 10},#sonar_front_center: {pin: 5, type: Ping, rate: 10},arduino_led: {pin: 13, type: Digital, rate: 5, direction: output}
}
4 测试
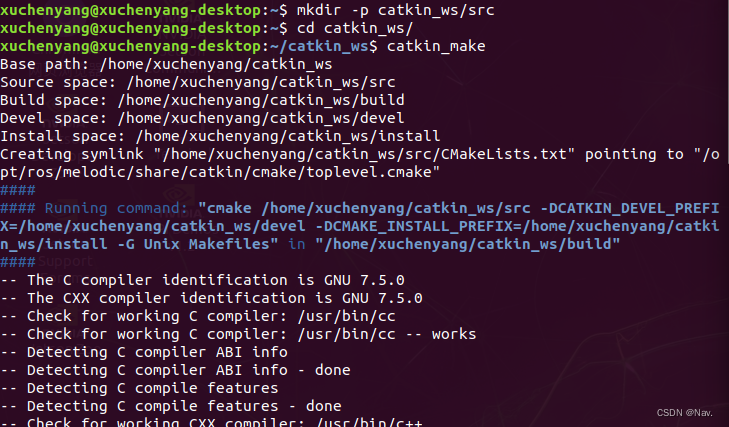
- 创建工作空间,并进入工作空间编译。
mkdir -p catkin_ws/src
cd ./catkin_ws
catkin_make
- 将ros_arduino_bridge程序放入src目录中。
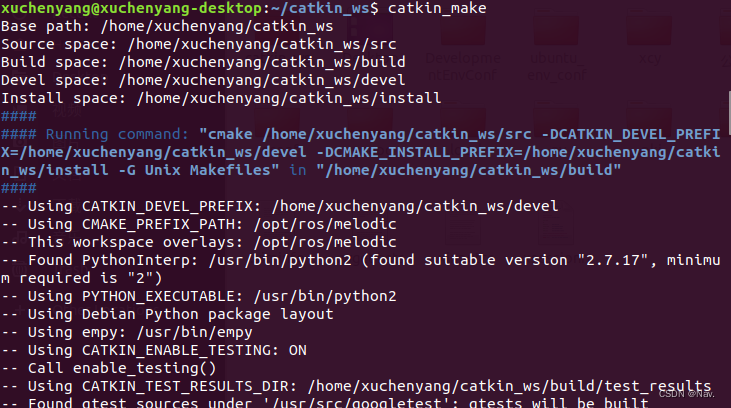
- 再次进行编译。
catkin_make
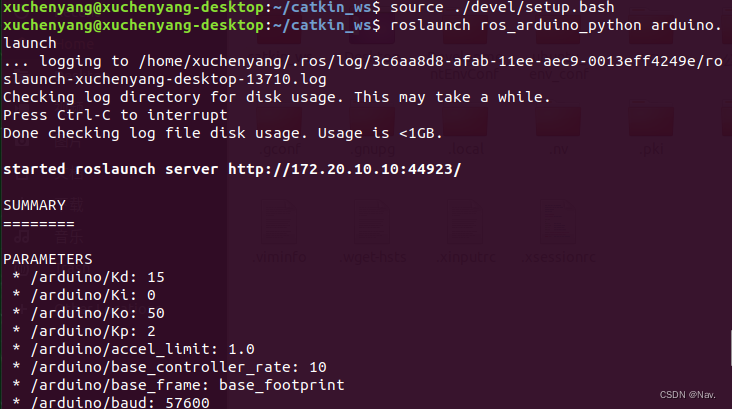
- 在Jetson nano端启动 ros_arduino_bridge 节点。
-
刷新环境变量,运行ros节点
-
发现错误,需要添加权限
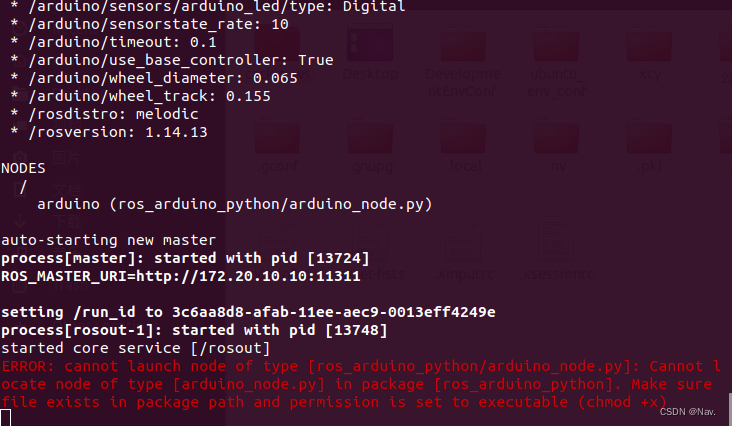
进入catkin_ws/src/ros_arduino_bridge/ros_arduino_python/nodes,为文件添加权限。
chmod +x ./*
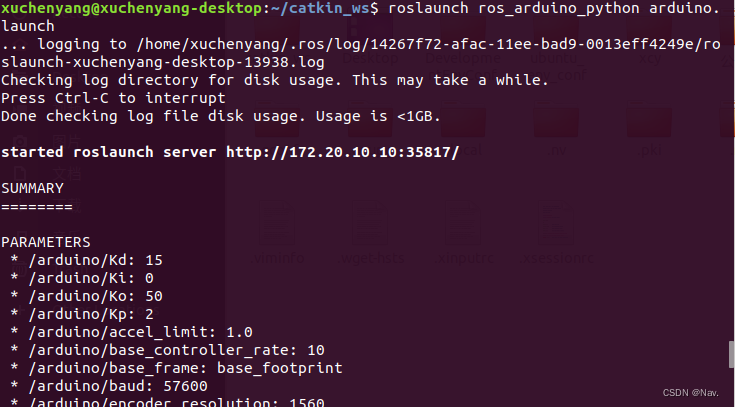
- 运行ros_arduino_bridge节点
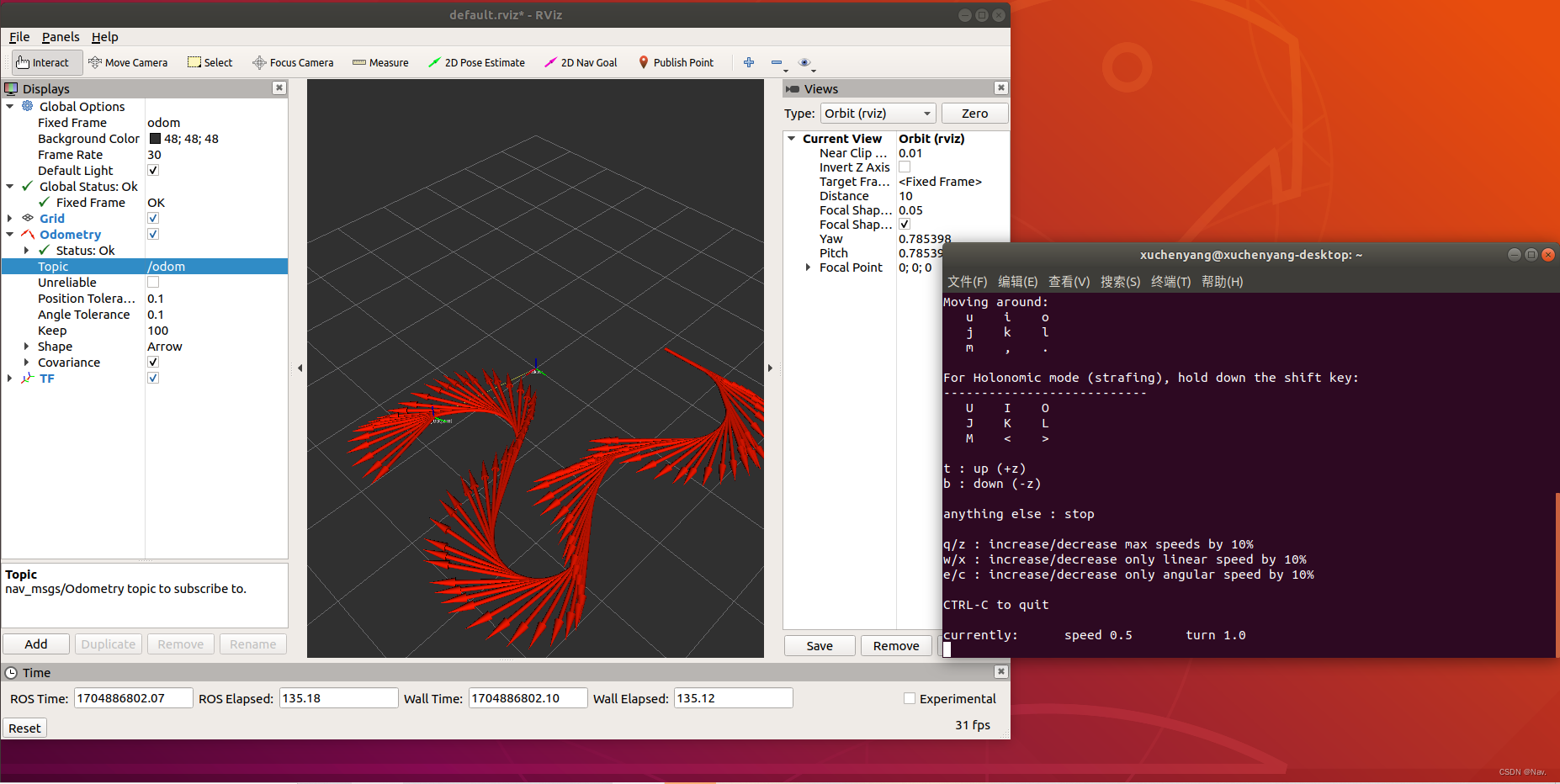
- 在PC端启动键盘控制节点。
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
- 启动rviz查看数据